


自主多智能体协同控制系统
Autonomous Vehicles Research Studio
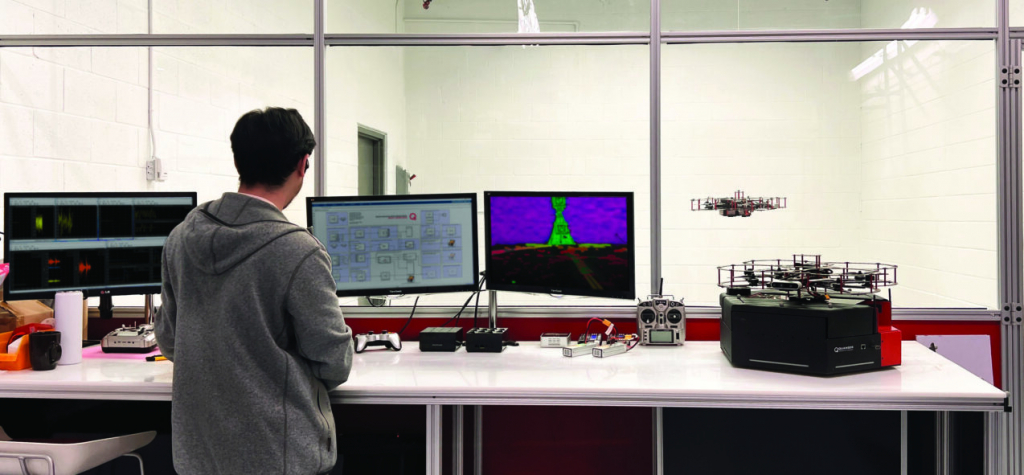
鲲航(Quanser)的室内自主多智能体协同控制系统是一个集合无人飞行器QDrone 2和地面移动机器人QBot Platform 为一体的多目标教学和研发平台。目前许多研究人员由于受到采用不同硬件和软件的无人工具制约无法进行不同无人工具之间的协调控制等方面的研究。鲲航的自主多智能体协同控制系统为广大研究人员提供了一个实现多智能体协调控制的工具,用户很方便地就可以将自己的控制器和算法通过这个平台工具进行实现及验证。比较适合的教学和应用研究范围包括:
无人工具的动态建模和控制研究
运动规划
避障控制
机器视觉
机器学习
多信息融合
编队控制
地空协同控制
无人工具自主控制等
视觉SLAM
传感器网络
群控策略
为什么选择室内实验?
鲲航(Quanser)的自主多智能体协同控制系统使用户可以在一个室内空间进行控制研究与教学。室内实验具有方便介入实验,环境安全可控,实验条件要求相对简单等优点。此外,即使是室内实验,我们对于无人飞行器(QDrone 2)采用特殊的防冲击破坏设计,避免实验人员在误操作等情况下对飞行器造成损坏。
该系统的实时控制软件是由鲲航(Quanser)研发的,完全兼容于MATLAB/Simulink的实时控制软件QuaRC。可方便地将Simulink仿真框图编译并下载到各装置的处理器,然后进行实时控制,不需要其它语言编程要求。对于每个无人工具的信号采集均通过兼容实时控制软件QuaRC的Intel Aero Computer Board采集卡,方便进行传感器数据采集并对驱动电机发出控制信号。同时,无人机上的IMU,GPU,各种视觉数据全部对用户开放,为方便研究人员添加更多的传感器,还预留了硬件接口,方便用户使用。本系统的定位通过6个OptiTrack照相机来完成,有关OptiTrack的标定、驱动等,都已经在QuaRC软件中以Simulink模块的形式实现。所有这些组成的强健的、开放式的环境使用户在短时间内就可以进行各种算法研究。
实验系统简介
本实验系统由如下几部分组成(如下图所示):
QuaRC实时控制软件和多智能体任务开发体系
地面控制站(包含室内定位)
无人飞行器QDrone 2
地面移动机器人QBot Platform

QuaRc实时控制软件和多智能体开发体系:
该系统的实时控制软件是由鲲航(Quanser)研发的,完全兼容于MATLAB/Simulink的实时控制软件QuaRC。该系统的工作原理采用Host-Target模式,控制器开发在装有MATLAB/Simulink的Host主机实现,控制器搭建完成后直接在Simulink下进行编译并通过无线通讯协议下载到无人工具的嵌入式控制器(target机)就可以进行实时控制了。此外,一台Host主机可以同时控制多台不同的嵌入式Target机器,从而很方便地就可以在MATLAB环境下进行多智能体系统控制研究。
地面控制站(包含室内定位):
鲲航(Quanser)的自主智能体协同控制系统可以通过一台地面控制计算机来实现,包括定位,多智能体控制等。而且整个控制都是在MATLAB/Simulink环境下来进行设计和实时控制实现。主控制机通过无线局域网与各个无人工具进行通讯。
地面控制站主要是进行定位和任务规划等目的。通过六个(或八个或十二个)红外照相机OptiTrack实现空间三维定位。一旦整个控制系统的控制算法设计完成,可以使控制站不仅仅起到定位作用,从而进行无人工具的自主控制及多个工具之间的协调控制研究。
高性能地面控制主机:
- Intel® Core i7
- 32GB DDR4 RAM
红外定位照相机OptiTrack技术参数:
| 摄像范围 | 20 m2 |
| 分辨率 | 1280 × 1024 |
| 摄像头水平视野 | 42°,56° |
| 帧速率 | 120 FPS |
| 单点跟踪个数 | 80个 |
| 最多同时捕捉对象物体个数 | 10个 |
| 标定时间 | 不超过5分钟 |
| 定位精度 | 毫米级 |
| 接口 | USB2.0 |
无人飞行器QDrone 2:
| 设备尺寸 | 50 cm × 50 cm ×15cm |
| 设备重量(带电池) | 1500g |
| 最大载重 | 300g |
| 电源 | 4S 14.8V LiPo(3700mAh) 电池 , 带 XT60 连接器 |
| 飞行时间 | 一次充满电后可飞行7~8分钟 |
| 装载的航空数据采集卡 | NVIDIA Jetson Xavier NX SOM (powered by a 6-Core NVIDIA Carmel ARM v8.2 64-Bit processor) 384-core NVIDIA Volta GPU with 48 Tensor Cores 8 GB 128-bit LPDDR4x RAM |
| 可扩展I/O口 | PWM (2x) UART (2x) SPI (2x SS pins) I2 (2x) ADC (1x) Encoder Input 2x CPU GPI0 6x |
| 深度摄像头 | Intel® RealSense™ (D435) Depth sensing (3 metre range) RGB (1920x1080 @ 30FPS) |
| 黑白高速摄像头 | Omnivision OV9281 Grayscale (1280x800 @ 120 FPS or 640x480 @ 180 FPS) |
| 广角摄像头 | Sony IMX219 |
| 机载传感器 | 2x 6-DOF IMU (gyroscope and accelerometer), 1x ToF height sensor |
地面移动机器人QBot Platform :
| 平台 | 2 轮差速驱动底座,带 4 个支撑脚轮 |
| 直径 | 570 mm |
| 高度 | 227 mm |
| 传动系统感应 | 每个车轮均配有电流感应、光学编码器和数字转速计 |
| 最大运动速度 | 1.5 m/s 速度和 1 m/s/s 加速度 |
| 标称运动速度 | 0.7 m/s 速度和 0.5 m/s/s 加速度 |
| 最大有效负载 | 20 kg |
| 工作时间 | 每块电池2小时 |
| 电源 | 2 块 84Wh LFP 电池,带外部充电功能 |
| 车载电脑 | NVIDIA Jetson Orin Nano |
| 向下摄像头 | 灰度带全局快门 – 640x400 @ 120Hz |
| 前置摄像头 | Intel RealSense D435 RGB-D 摄像头 |
| 雷达 | 2D 360° 激光雷达,每秒 16,800 点 |
| IMU | 带加速计和陀螺仪的 6 轴 IMU |
| 通用输入输出接口GPIO | 40 针接头,包括 SPI / I2C / UART / PWM |
| LEDs | 用户可编程 LED |
| LCD | 字符显示模块 |
| 语言 | MATLAB / Simulink / Python / ROS 2 |
| USB 接口 | 4x USB 3.0 用户端口 |
| HDMI | 1 full HDMI 接口 |
| 连接 | IEEE 802.11ac Wi-Fi 和千兆位以太网端口 |
客户定制
用户可以根据自己的研究及教学任务自行增加地面移动机器人或无人飞行器等。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号