




无人驾驶实验平台及其数字孪生
Self-Driving Car Studio and QLabs Virtual QCar2
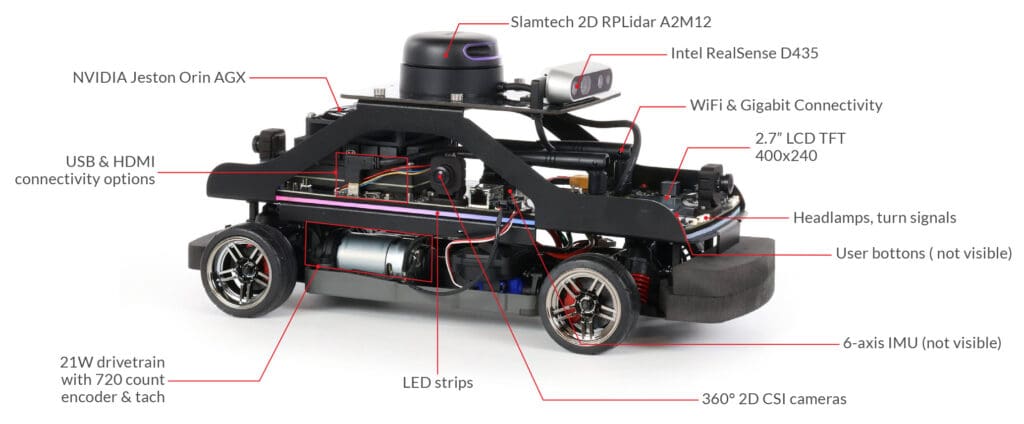
无人驾驶实验平台是一个专为高校实验室而设计的可高度扩展、配备多种传感器且功能强大的实验平台。可用于进行数据集成、地图绘制、导航、机器学习、人工智能和其他高级无人驾驶概念的研究学习。 无人驾驶实验平台配备多种传感器,包括LIDAR、360度视觉传感器、深度传感器、IMU、编码器以及可扩展I/O口,可以实现对周围环境的准确测量。无人驾驶实验平台提供的开放式架构使得使用者可以研发自己的控制器。无人驾驶实验平台可为使用者提供多种语言开发环境,包括MATLAB®/Simulink®, Python™和ROS等。
随着无人驾驶汽车研究的深入,许多科学家和研究人员都遇到了许多挑战。其中最大的挑战就是,很难找到一个支持多种主流编程语言的无人驾驶实验平台。每个研究者所使用的编程语言不可能完全一样,因此研发出一款兼容多种编程语言的实验平台是一个必须要面临的挑战。而我们的无人驾驶实验平台可为使用者提供多种语言开发环境,包括MATLAB®/Simulink®, Python™和ROS等。很好的为使用者解决了这个巨大的挑战,使用者们无需再为研究无人车而去新学习一门语言。
其次,研发无人车所需要投入的经费成本、人力资源和时间都是非常大的,很多研发者都难以承担。 无人驾驶实验平台可以说是一款十分成熟可靠的无人驾驶实验平台了,您可以直接使用,也可添加一些创新性的可扩展模块。这可为您节省大量的资源和时间,为您的实验研究提供可靠的助力。
除此以外,我相信我们的无人驾驶实验平台可以快速地为您找到找到自己的正确定位,可以快速地为您验证您的研究成果,可以成为您研究路上的可靠助力。
技术参数:
| 车载计算机 | NVIDIA Jetson Orin AGX CPU: 2.2 GHz 8-core ARM Cortex-A78 64-bit GPU: 930 MHz 1792-CUDA/56-TENSOR cores NVIDIA Ampere GPU architecture 200 TOPS Memory: 32GB 256-bit LPDDR5 @ 204.8 GB/s |
| 网络连接 | WiFi 802.11a/b/g/n/ac 867Mbps with dual antennas 2个HDMI端口,支持双监视器 1个10/100/1000 BASE-T Ethernet |
| 附加部分 | 前照灯、制动灯、转向信号灯和倒车灯(可控制灯光强度) 双麦克风 扬声器 LCD diagnostic monitoring, 电池电压 支持自定义指导书 |
无人驾驶实验平台支持的Software&API:
- TensorFlow
- Python™ 2.7 / 3 & ROS 2
- CUDA®
- cuDNN
- TensorRT
- OpenCV
- VisionWorks®
- VPI™
- GStreamer
- Jetson Multimedia APIs
- Simulink® with Simulink Coder
- 支持 GPU 的 Docker 容器



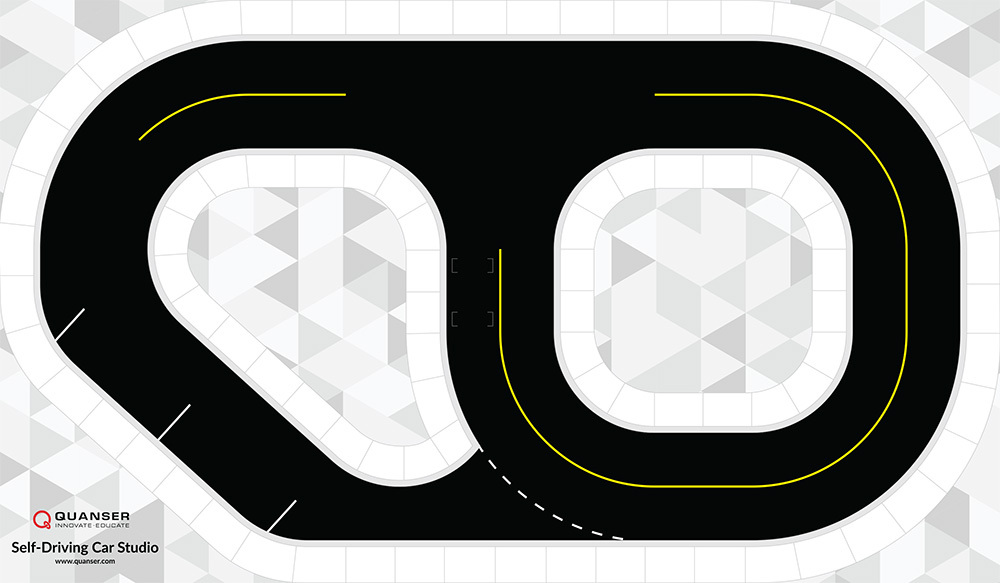



无人驾驶数字孪生
无人驾驶数字孪生它的操作方式与物理硬件相同,可以使用Python、ROS和MATLAB Simulink开发环境进行测量和控制。
自动驾驶汽车工作室拥有一个可重构且视觉丰富的虚拟环境,可以映射出其周围的物理环境,这可以丰富您的讲座、实验室、研究和推广活动。除了课堂和研究实验室,该平台还提供了远程课程和在线课程的混合或混合配置,为学生提供基于技能的学习体验。
课件:
- 图像采集和摄像头接口
- 传感器接口和运动学建模
- 线路检测和车道保持
- 占用率网格映射
- 传感器融合
- 目标检测和分类
- 横向和纵向控制
- 自动驾驶行为规划
无人驾驶数字孪生在Windows 10或更高版本上运行,需要为MATLAB和Simulink R2021a或更高版设计的课程,兼容Python 3。至少满足300人同时在线使用。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号