

基于QUBE-Servo 2的项目式学习
自7年前首次发布以来,我们的QUBE-Servo 2已被世界各地的大学广泛采用。它配有惯性盘和摆杆的两个可互换模块,可用于进行一系列标准控制实验。而QUBE的关键功能之一是它的灵活性,可以支持您构建和附加自己的模块。通过本篇博客,我将展示教师如何通过这一特性为课程、实验室或项目建立一套独特的基于设计的学习方法,以适应不同水平的学生。
附有惯性盘和摆杆模块的QUBE-Servo 2
项目概述
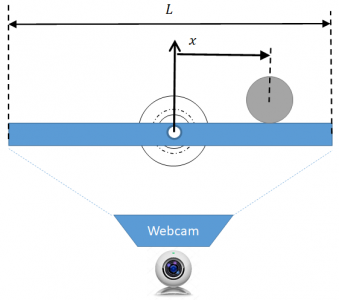

球杆系统的原理图及实际模型
本项目所涉及的各种任务的高级视图如下所示。它包括杆组件的机械设计,实现球杆平衡的控制方案,以及图像处理。
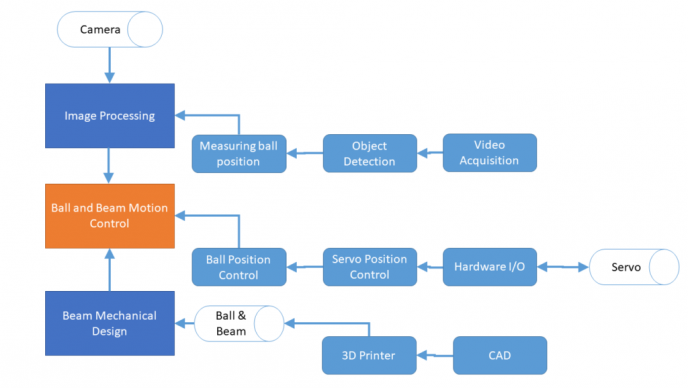
项目概述
球杆控制回路如下图所示。球的位置使用网络摄像头和各种图像采集和处理软件工具(例如QUARC Video Capture模块)进行测量。外环-球位置控制器,根据测量的球的位置计算出将球稳定在期望位置所需的伺服角度。内环-伺服位置控制器,根据编码器测量的当前电流角度施加跟踪球位置所需的伺服角度电压。
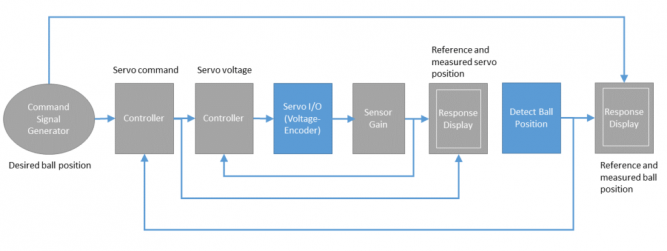
球杆控制回路
以下是我们实际使用的模型运行的视频。
现代机电一体化系统设计方法
机电一体化系统是一种集成传感器、执行器、计算能力和通信协议的智能系统。例如,无人机是机电一体化系统。它具有一个带IMU传感器的板载处理器和执行器。
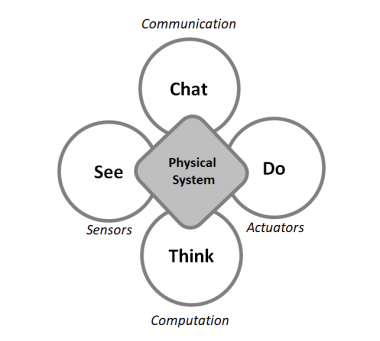
现代机电一体化系统组件
基于上述定义,我们认为球杆系统也是一个机电一体化系统,因为它包含以下组件:
- 传感器:QUBE-Servo 2编码器和球的位置传感器(例如摄像头)
- 执行器:QUBE- Servo 2直流电机
- 计算:在PC/ laptop/MCU上运行控制器
- 通信:QUBE-Servo 2 USB数据采集(DAQ)设备
完成项目所需的软件资源可分为三组,如下所示:控制平台、工具箱和基础模块。
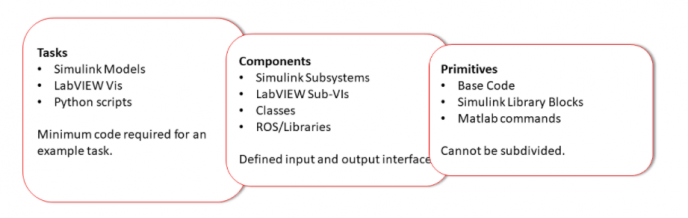
软件定义
为了适用于不同知识水平的学生(如本科生和研究生),教师可以选择提供什么,下面是一个示例细分:
级别1 | 本科大一或大二 |
|
级别2 | 本科大三或大四 |
|
级别3 | 研究生或高级本科项目 |
|
例如,如果使MATLAB/Simulink 和 QUARC 实现此项目,则根据预期级别,学生可以执行以下操作:
- 级别1:提供完整的Simulink 模型(即控制器)。学生将测试模型并调优值。无需进行重大设计修改。
- 级别2:教师提供包括软件子系统的Simulink 库(即工具箱)。学生使用库中预定义的 Simulink 子系统模块来设计任务。
- 级别3:教师可能会为某些任务提供一些工具箱,但在大多数情况下,学生需要自己会使用基础模块。在这一水平下,学生将会根据“Fundamentals”和QUARC Targets库中的Simulink模块设计控制器。
为了帮助教师实施此项目,我们整合了以下资源:
- 教师指南:Excel 电子表格,详细说明了三个不同级别的项目中每个任务的文档和软件。
- PPT:完成整个控制设计和实现过程。教师可以决定为课程使用哪些幻灯片,或与学生共享。
- 控制器:MATLAB 脚本、Simulink 模型和 Simulink 库。这些文件分为“设计”和“调优”类型文件。“设计”文件使用基础模块,在这种情况下,基础模块是Simulink模块和QUARC Target模块。“调优”文件使用工具箱或预制的Simulink库。
- 视频:说明性视频,演示设计过程的所有步骤。
讲师可以使用“教师指南”电子表格,根据他们的经验水平选择提供给学生的文件。例如,如果该项目是由仅学习一门控制系统课程的大三学生完成的,则讲师可以选择为学生提供不同的工具箱(即Simulink库)以完成与伺服运动控制和球杆系统相关的任务。
目前已经有Quanser用户完成了类似类型的项目,例如NYIT(请参见下文)。这可以添加到现有课程的实验室中,被指定为最后一年的团队项目,用于课程"冲刺"中使用等等。
如何获得访问权限?
这是一个非常灵活的面向项目的设计挑战,可以针对具有不同经验水平和背景的学生进行扩展。它可以添加到现有课程的实验室中,分配为最后一年的团队项目,在课程"冲刺"中使用等等。
如果您是有兴趣运行此项目或了解可用项目资源的教师,请通过 info@chinaai2.com联系我们,主题为" QUBE-Servo 2 Ball and Beam Design Project"。我们的Quanser工程师将与您联系,并向您展示如何开始使用。
我们还有一个"快速入门"版本,允许您运行完整的控制器,并查看它是否适合您的课程。硬件和软件要求如下。
硬件/软件要求
- MATLAB/Simulink
- QUARC基础版
- QUBE-Servo 2
- 摄像头
- 球杆(例如带有乒乓球的3D打印连杆)
注: NYIT 球杆项目
这个基于项目的学习方法首先由纽约理工学院(NYIT)电气和计算机工程系副教授Ziqian (Cecilia) Dong在2011年和2012年春季完成的,用于EENG 491大四设计项目。 本科四年级学生通过使用旋转伺服基础单元、球杆系统以及QUARC 实时控制软件进行控制系统的设计和实现。学生们几乎没有控制系统的经验,甚至许多人从未使用过MATLAB / Simulink。在学习了控制系统的设计和实现之后,他们使用不同的球位置传感技术设计了他们自己的2自由度球平衡器系统。有关更多详细信息,请参阅Prof. Dong及其同事在2012年ASEE年度会议上提交的论文,题为"AC 2012-2956: Infusing the Curriculum with Cutting Edge Technologies through Partnerships with Industry"
分享到:
 沪公网安备 31011202011813号
沪公网安备 31011202011813号