

1、背景介绍
无人驾驶技术使汽车在智能驾驶方面体现出更加显著的作用。因此,这项技术潜的应用前景引起了研究人员的广泛关注。加拿大Quanser公司研发的无人驾驶实验平台QCar是一个专为高校实验室而设计的可高度扩展、配备多种传感器且功能强大的实验平台。它可用于数据集成、地图绘制、导航、机器学习、人工智能和其他高级无人驾驶概念的研究、学习。接下来,将介绍基于非线性控制方法使QCar完成高精度的轨迹跟踪,并通过该实验平台验证算法的有效性。
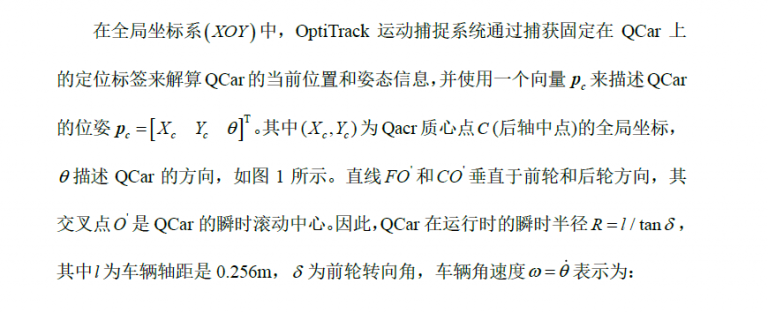
2、模型介绍
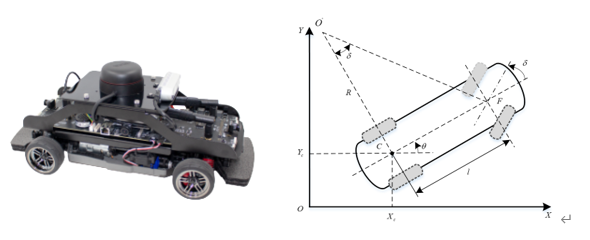
图1 QCar实物及简化的物理模型
3、控制方法
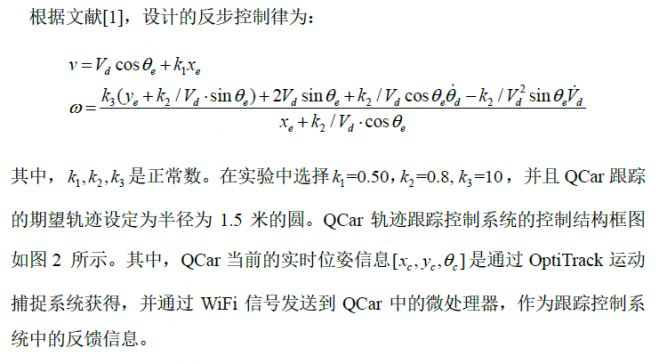
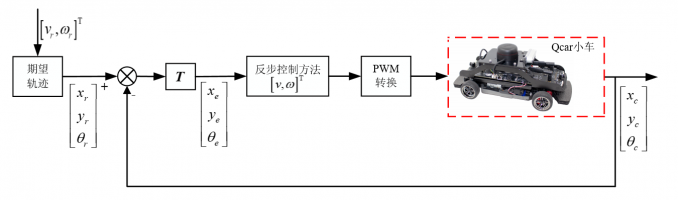
图2 QCar反步法轨迹跟踪控制框图
进一步地,基于误差系统设计的反步控制律,可以使误差系统稳定,也就是误差跟踪误差会渐近收敛,从而实现轨迹跟踪。值得注意的是,基于误差系统模型设计的控制律 需要进一步的转为QCar小车可需要的控制输入PWM波,来调节电机的转速,从而完成QCar的轨迹跟踪。
4、Simulink仿真及实验
Quanser公司研发的QCar综合实验平台,对研究人员的友好性体现在,它可以把Simulink搭建好的程序编译成C代码便捷地下载到QCar的微处理器中。并且可以实现在线的参数调节。从而避免研究人员在Simulink中完成仿真验证后,又需重复编程在其他实验平台验证的工作。基于反步控制方法设计的运动学控制律,在Simulink中的程序搭建如图3所示。
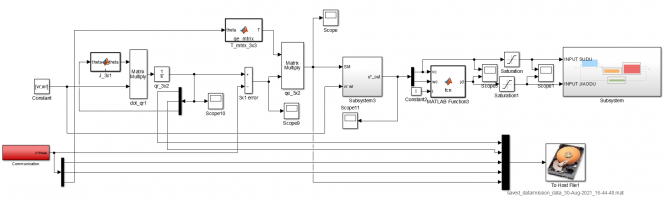
图3 QCar反步法轨迹跟踪控制Simulink程序搭建
值得注意的是,QCar当前的实时位置是通过Quanser公司在Simulink工具箱中提供的Stream Client模块接收到的,也就是图3中的红色高亮部分,具体模块如图4所示。QCar实时位姿获取的流程是,当OptiTrack开始工时,电脑主机将会把解算的QCar位姿信息通过另一个模块Stream Server发送给QCar, 然后QCar通过Stream Client模块得到自身当前的位置,完成这个过程的必要条件是主机和QCar需要处于同一个局域网中。
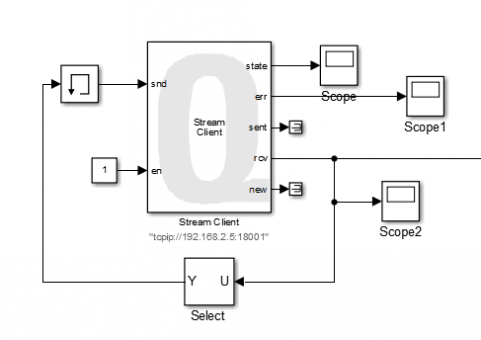
图4 Stream Client模块
根据在QCar实验平台进行的实验结果,可以得到实际的轨迹跟踪控制效果如图5所示,反步控制律可以使QCar很快的跟踪上期望轨迹,且保持很好的控制精度。这样可以进一步的通过图6的轨迹跟踪误差收敛图进行验证,可以发现轨迹跟踪误差可以在20秒内收敛,且保持在一个很小的范围内波动,即,QCar跟上了期望的轨迹。那也就是说QCar可以通过实验的方式方便地验证研究人员设计的控制算法的有效性。
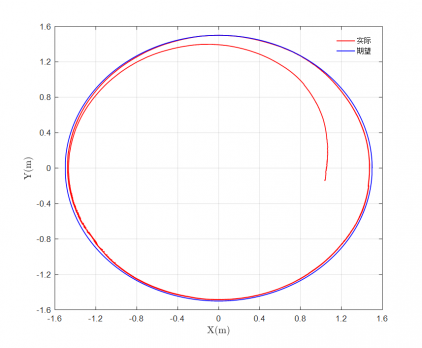
图5 QCar轨迹跟踪效果
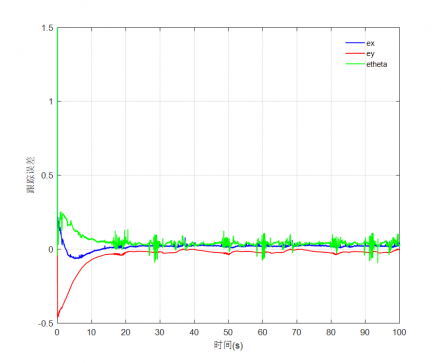
图6 QCar轨迹跟踪误差收敛图
5、参考文献
[1] J. Hu, Y. Zhang, and S. Rakheja, “Adaptive trajectory tracking for carlike vehicles with input constraints,” IEEE Trans. Ind. Electron., doi: 10.1109/TIE.2021.3068672.
 沪公网安备 31011202011813号
沪公网安备 31011202011813号