


回望来时路
那是我在多伦多大学读大二的尾声时期。所有同学都像追剧一样守在Praxis IV(工程设计课)的最后几节课堂前——没有考试,没有小测,只有来自全球的最新视频和前沿研究。
- 用于锂电池的碳纳米颗粒
- 200英尺高的混凝土立柱,能把洋流引起的共振降到最低
- 以及现代小便器如何减少飞溅(是的,真的有人研究这个)
直到大四学年,学校才第一次开设AER525《机器人学导论》。我把前几年学过的所有知识融入进了机械臂的应用场景:线性代数、运动学、动力学、路径规划、控制理论等课程。这门课里,除了我们5个航空工程方向的学生,还有大约25名来自机械、电气等其他Core-8项目的同学。很快大家就发现,要把前两年学过的基础知识重新“捡回来”并不容易——至于为什么,原因复杂得一言难尽。虽然我的个人经历以及这篇文章都聚焦在机械臂上,但这种“基础断层”其实普遍存在于各个工程领域。
时间可达性
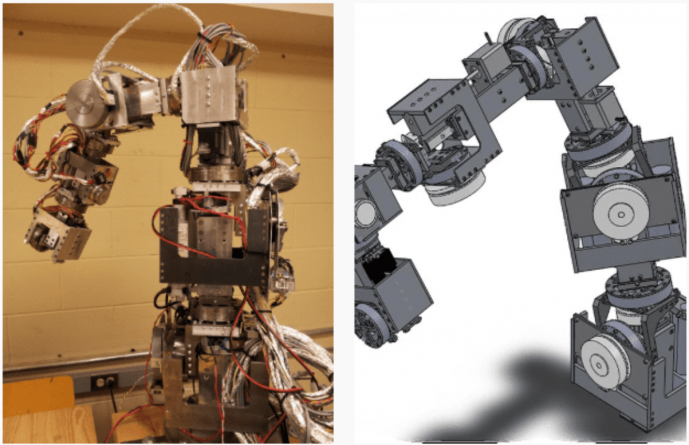
在AER525这门课上,我第一次接触到Denavit-Hartenberg(DH)参数。紧接着,老师就用大量实例,把这套公式直接套用到各种机械臂的简图上。课程还安排我们上手模拟一台18自由度的机械臂:它由6个模块组成,每个模块含2个转动关节和1个滑动关节,可以随时锁定或解锁。借助这套装置,我们能轻松地在不同构型的机械臂上反复练手,把DH框架真正“玩”熟。
在Quanser任职的第一年,公司给了我一项任务:让固定式三自由度四旋翼实验平台(3-DOF Hover)在用户指定的俯仰角与滚转角下,持续保持原地偏航运动。尽管我具备航空航天工程背景,却对四旋翼系统知之甚少。鉴于该平台为地面固定式结构,我决定直接采用 Denavit–Hartenberg(DH)约定,将其建模为串联机械臂。约一小时后,3-DOF Hover便精确复现了所需运动轨迹。
- 在大一的线性代数课上,就让他们搬来一台机械臂,现场演示旋转矩阵和基坐标系如何让机械臂末端精准移动;
- 在大二的《机电系统设计导论》课程中,为正在学习有刷电机与伺服电机的学生配备1:10比例自动驾驶小车,激发其在速度与转向控制实验中对基础原理的深入探究与学习热情。
谈及“具有实质意义的硬件实践”,本人在整个培养方案中获得的机会寥寥。工程科学(Engineering Science)专业本身即以理论研究为导向,这一现实无可厚非。唯一令我印象深刻的是 AER372《控制系统导论》。该课程的实验环节全部采用Quanser直线倒立摆(linear cart),在四次循序渐进的实验中分别完成系统建模、PID控制及状态空间控制等关键内容。

结语
在我本科与硕士阶段,凡是让我印象最深刻、回忆最轻松的课程,往往也是教学效果最好的;反之,对于学习过程艰难之课程,回忆时仍感不适,大脑本能地回避那段经历。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号