

顶刊突破 | 基于鲲航(Quanser)多智能体协同控制实验装置,多智能体协同控制研究登IEEE TII(IF=9.9)
近日,一项针对多网络化欧拉 - 拉格朗日系统的协同控制研究成果重磅发表于工业信息领域顶刊IEEE Transactions on Industrial Informatics (IEEE TII)(IF=9.9,中科院1区TOP)。该研究由约克大学团队完成,基于鲲航(Quanser)多智能体协同控制实验装置开展真机实验验证,提出了一种全新的全分布式自适应动态事件触发鲁棒控制策略,成功解决了参数不确定、外部扰动、通信资源受限等多智能体协同控制核心难题,为无人机编队、自主机器人集群等实际工程应用提供了高效可靠的技术方案。
此次研究成果的落地,充分印证了鲲航(Quanser)多智能体协同控制实验装置在高精度控制算法验证、多智能体系统研究中的核心价值,是理论创新与工程实践深度融合的典范。
研究背景:多智能体协同控制的核心挑战
随着物联网与自主系统的快速发展,由无人机、机械臂等组成的多智能体系统,在工业巡检、航空物流、智能机器人等领域应用愈发广泛。其中,以欧拉 - 拉格朗日系统为模型的机械系统(如四旋翼无人机),其协同控制面临多重关键挑战:
- 系统存在参数不确定性、未知外部扰动,易降低跟踪控制精度甚至引发失稳;
- 网络通信与计算资源有限,传统连续通信控制模式易造成资源浪费、网络拥塞;
- 实际场景中难以获取精准的状态测量信息,且缺乏全局拓扑信息,增加了分布式控制设计难度;
- 多智能体协同需实现高精度轨迹跟踪与编队保持,对控制算法的鲁棒性和实时性要求极高。
针对上述问题,研究团队提出了融合自适应滑模估计、动态事件触发、时变滑模控制的一体化解决方案,并依托鲲航(Quanser)多智能体协同控制实验装置完成全场景真机验证。
核心创新:四大技术突破,攻克行业难题
研究团队的核心贡献在于设计了全分布式自适应动态事件触发鲁棒控制策略,相较于传统控制方法,实现了四大关键技术突破,兼具理论创新性与工程实用性:
1. 自适应动态事件触发机制,大幅节省通信资源
摒弃传统固定阈值的事件触发策略,设计了动态可调阈值的自适应触发方案,通过引入动态变量实时调整通信触发间隔,仅当系统状态误差超过阈值时才进行数据传输与控制器更新。实验表明,该方案相较静态触发、传统自适应触发策略,资源利用率仅为 10.95%,通信资源消耗降低 21.5% 以上,且无芝诺现象(Zeno),有效解决了多智能体通信拥塞问题。
2. 嵌套自适应滑模估计,实现无全局信息的状态精准重构
针对状态测量不精准、难以获取领导者全局信息的问题,提出双层嵌套自适应滑模估计器,无需领导者状态导数上界等全局信息,仅通过局部通信即可精准估计动态领导者的速度、加速度状态。真机实验中,速度平均估计误差低至0.35 cm/s,加速度平均估计误差仅0.17 cm/s²,为分布式控制提供了高精度状态支撑。
3. 时变滑模鲁棒控制,抗扰动能力显著提升
融合自适应控制与时变滑模控制技术,设计了无需扰动上界先验知识的鲁棒控制协议,有效补偿参数不确定性、固有非线性和外部扰动的影响,同时削弱初始误差对控制增益的冲击,避免控制信号饱和,提升控制精度。在风机强扰动(最高风速档)下,仍能保持稳定的编队跟踪性能。
4. 全分布式设计,工程可实现性强
整个控制策略为全分布式架构,无需任何全局拓扑信息,且无需相邻智能体间的相对速度测量,大幅降低计算复杂度和工程实现难度,更贴合无人机编队、机器人集群等实际应用场景的需求。
真机验证:鲲航(Quanser)多智能体协同控制实验装置成为核心支撑
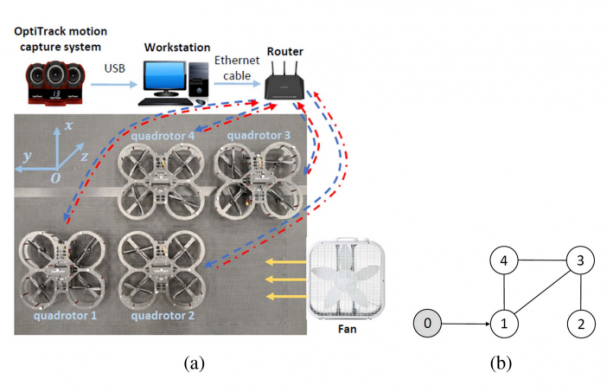
为验证控制策略的有效性、鲁棒性和工程实用性,研究团队基于鲲航(Quanser)多智能体协同控制实验装置搭建了由4台QDrone组成的多智能体实验系统,完成了全场景真机验证,实验系统核心配置与验证过程如下:
实验平台核心优势
鲲航(Quanser)多智能体协同控制实验装置是专为多智能体协同、飞行控制算法研究打造的高精度实验平台,为本次研究提供了关键支撑:
- 搭载高精度IMU传感器、Intel AERO机载计算机和内置Wi-Fi,实现状态精准采集与低延迟通信;
- 兼容OptiTrack运动捕捉系统,可实现亚毫米级的位置与速度定位,为实验数据采集提供高精度保障;
- 支持模块化控制算法开发,无缝对接Matlab/Simulink 等仿真平台,实现算法仿真-真机验证的一站式落地;
- 具备良好的抗扰动能力,可模拟实际场景中的外部干扰,适配鲁棒控制算法的验证需求。
严苛实验认证,成果表现优异
实验中设置了动态领导者轨迹跟踪、固定编队保持、多档位风机外部扰动等严苛场景,将所提策略与静态事件触发控制、现有顶刊控制策略进行对比,结果显示:
- 轨迹跟踪精度高:相较传统静态触发策略,位置跟踪平均误差降低10.8%(MAE);相较现有顶刊策略,误差降低47.4%(MAE),在强扰动下仍能保持厘米级跟踪精度;
- 编队保持稳定:4 台QDrone可精准实现预设的平面编队,在动态轨迹跟踪过程中,编队相对距离误差始终控制在极小范围;
- 抗扰动能力突出:在风机S1-S3三档扰动下,系统估计误差与跟踪误差无明显增大,充分验证了控制策略的鲁棒性;
- 资源效率最优:在保证控制性能的前提下,通信触发次数远低于对比策略,大幅节省无人机的通信与计算资源,提升续航能力。
成果价值:理论创新与工程应用的双重突破
本次发表于 IEEE TII(IF=9.9)的研究成果,不仅在多网络化欧拉 - 拉格朗日系统控制领域实现了理论创新,完善了全分布式事件触发控制的理论体系,更通过鲲航(Quanser)多智能体协同控制实验装置的真机验证,证明了策略的工程实用性,具有重要的应用价值:
- 为无人机编队应用提供新方案:可直接应用于多无人机协同巡检、物流配送、应急救援等场景,在节省通信资源的同时,提升编队的抗扰动能力和跟踪精度;
- 推动自主机器人集群技术发展:所提控制策略可拓展至机械臂、移动机器人等欧拉- 拉格朗日系统,为多机器人集群的分布式协同控制提供技术参考;
- 验证了高精度实验平台的核心作用:鲲航(Quanser)多智能体协同控制实验装置的高精度、高兼容性和高可靠性,成为连接控制算法理论研究与工程实践的关键桥梁,为相关领域的研究提供了高效的实验支撑。
结语
此次研究成果登上 IEEE TII 顶刊,是控制理论创新与高精度实验平台深度融合的成果,既彰显了全分布式自适应动态事件触发鲁棒控制策略的技术优势,也印证了鲲航(Quanser)多智能体协同控制实验装置在多智能体协同控制研究中的核心价值。
未来,随着多智能体系统在各行业的广泛应用,高效、鲁棒、资源友好的控制算法将成为研究重点,而鲲航(Quanser)的多智能体协同控制实验装置,也将持续为控制理论创新、工程技术验证提供坚实支撑,推动更多从 “实验室” 到 “实际场景” 的技术转化。
研究信息
- 期刊:IEEE Transactions on Industrial Informatics (IEEE TII),2025年第21卷第9期
- DOI:10.1109/TII.2025.3567383
- 实验平台:鲲航(Quanser)多智能体协同控制实验装置
- 核心结论:所提控制策略实现了通信资源节省与控制精度提升的双重目标,真机验证下表现出优异的鲁棒性和工程可实现性。
分享到:
 沪公网安备 31011202011813号
沪公网安备 31011202011813号