

东南大学团队提出的ANFTC-DOC方法,构建了“故障补偿-扰动抑制-动态约束”三位一体的控制框架:
1.基于径向基函数神经网络(RBFNN)精准逼近执行器故障与系统不确定性,搭配非线性扰动观测器(DO),高效抵消外部干扰与神经网络逼近误差;
2.创新设计距离触发函数与屏障函数,车辆根据与障碍物的实时距离,自动实现约束/无约束模式的平滑切换——开放道路放松约束降低能耗,临界场景激活约束筑牢安全边界;
3.通过Lyapunov稳定性理论严格证明,确保闭环系统所有误差有界,轨迹跟踪精度与安全性兼得。
理论的落地离不开高保真实验平台的支撑,鲲航(Quanser)无人驾驶实验平台 凭借其模块化设计与精准的动力学特性,成为验证该控制算法的核心工具:
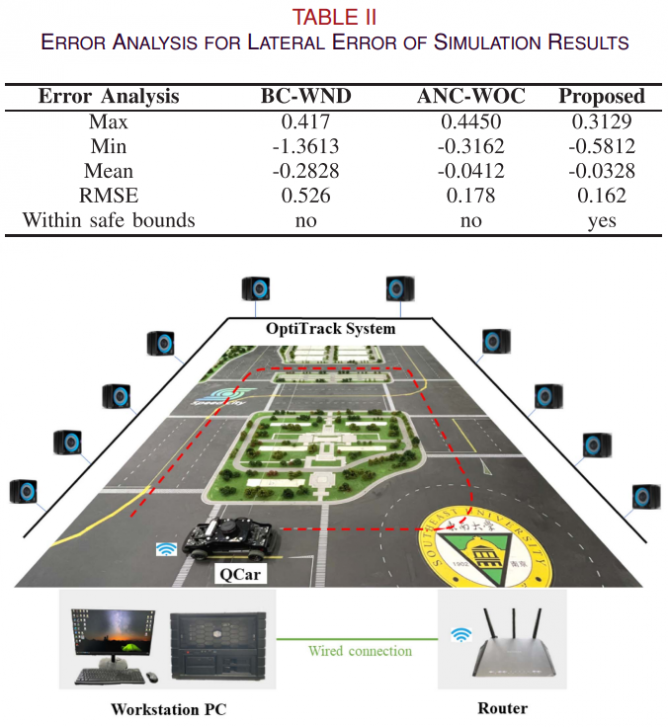
1.高保真硬件基座:鲲航(Quanser)无人驾驶实验平台搭载 quad-core ARM Cortex-A57嵌入式处理器,支持实时数据采集与控制指令执行,其动力学模型可通过数据驱动方法精准校准,完美复现真实车辆的操控响应;
2.多源数据融合:配合OptiTrack运动捕捉系统,实现车辆位置、姿态信息的毫秒级采集,为故障模拟、轨迹跟踪误差分析提供高精度数据支撑;
3.复杂场景复现:在实验中模拟执行器乘法故障(ρf=0.5)、窄路障碍等典型场景,鲲航(Quanser)无人驾驶实验平台成功验证了ANFTC-DOC方法的鲁棒性——即使在故障发生时,仍能将横向跟踪误差控制在±0.05m 安全边界内,而传统方法或碰撞障碍,或频繁触碰约束边界。
- 横向跟踪RMSE低至0.0201,精度提升超30%;
- 故障场景下无碰撞风险,约束切换无冲击,操控连续性优异;
- 开放道路无约束模式降低控制负担,兼顾能耗与乘坐舒适性。
此次研究不仅为自动驾驶容错控制提供了新的技术路径,更彰显了鲲航(Quanser)无人驾驶实验平台在前沿科研中的核心赋能作用。鲲航(Quanser)无人驾驶实验平台作为机电一体化、智能控制领域的标杆级实验设备,其灵活的二次开发能力、与MATLAB/Simulink的无缝衔接特性,已成为高校及科研机构开展自动驾驶、机器人控制等研究的“得力助手”。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号