

路径规划作为移动机器人智能化的核心技术,一直是学界和工业界的研究重点。目前主流的 RRT(快速探索随机树)系列算法虽具备渐近最优性,但在复杂、迷宫类场景中,始终存在难以规避的技术瓶颈:一是盲目采样,固定的目标偏向概率无法适配不同障碍物密度的环境,导致无效探索增多,收敛速度慢;二是路径成本高,规划出的路径存在冗余线段和尖锐转弯,不仅增加机器人运动能耗,还影响轨迹跟踪精度;三是稳定性差,在高复杂度环境中迭代次数多,难以满足工业场景对实时性和精度的双重要求。
针对传统RRT系列算法的痛点,研究团队提出的IF-RRT算法从采样、路径优化、节点处理三个核心环节进行创新,实现了算法性能的全方位提升,而所有优化方案均基于鲲航(Quanser)地面移动机器人完成适配与验证:
混合采样策略,让机器人 “精准找路” 告别盲目探索
团队融合动态目标偏向与位置约束采样打造混合采样算法,通过Sigmoid函数根据碰撞检测次数实时调整目标偏向概率——障碍物密集时降低偏向概率,避免无效探索;开阔环境时提高偏向概率,加速逼近目标。同时,位置约束采样确保每次采样点都比上一个有效点更靠近目标,从根源减少冗余采样。这一策略让算法在简单环境中收敛时间直接缩短66.6%,采样效率实现质的飞跃。
优化Rewire过程,依托三角形不等式降低路径成本
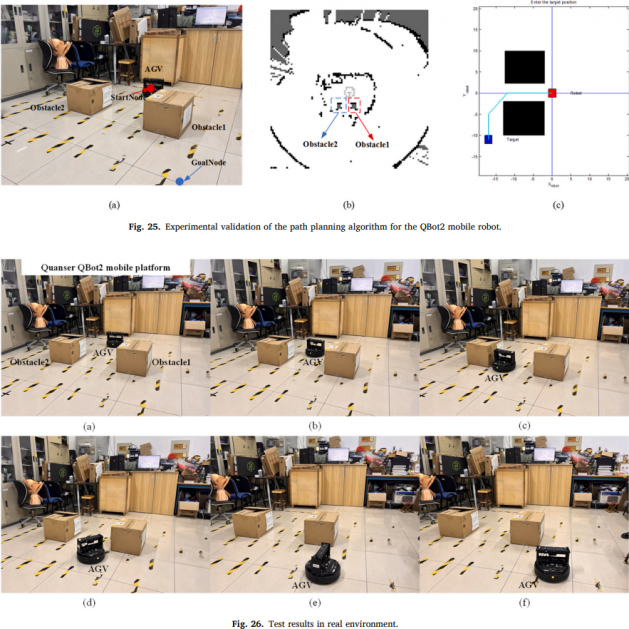
再好的算法创新,都需要可靠的硬件平台完成落地验证,研究团队选择鲲航(Quanser)地面移动机器人作为实验平台,其微分驱动结构、全方位的环境感知传感器(陀螺仪、接触碰撞传感器、悬崖检测传感器),以及与MATLAB/Simulink 的无缝对接能力,为IF-RRT*算法的仿真与实物验证提供了完美适配的硬件支撑。
此次发表于《Engineering Applications of Artificial Intelligence》的研究成果,是燕山大学在智能机器人与人工智能算法交叉领域的重要突破,该期刊作为人工智能工程应用领域的顶级期刊,其认可也印证了IF-RRT*算法的学术价值和工程应用潜力。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号