


多软件融合的协作自主系统
QStudio
多软件融合的协作自主系统是一套包含无人驾驶实验平台和自主多智能体协同控制系统的新一代科研平台,是集合了我们最新的无人飞行器、两轮机器人、可用于无人驾驶研究的四轮机器人和虚拟数字孪生为一体的多目标教学与研发平台。我们为用户提供包含实验室环境搭建、设备调试与运行、软件配置和资源导入的交钥匙实验室解决方案,为用户提供了丰富的示例、可靠且强大的硬件以及灵活且通用的软件工具和框架,帮助用户在数月内快速构建实验室和验证算法,从而更快地将概念、算法转化为论文。
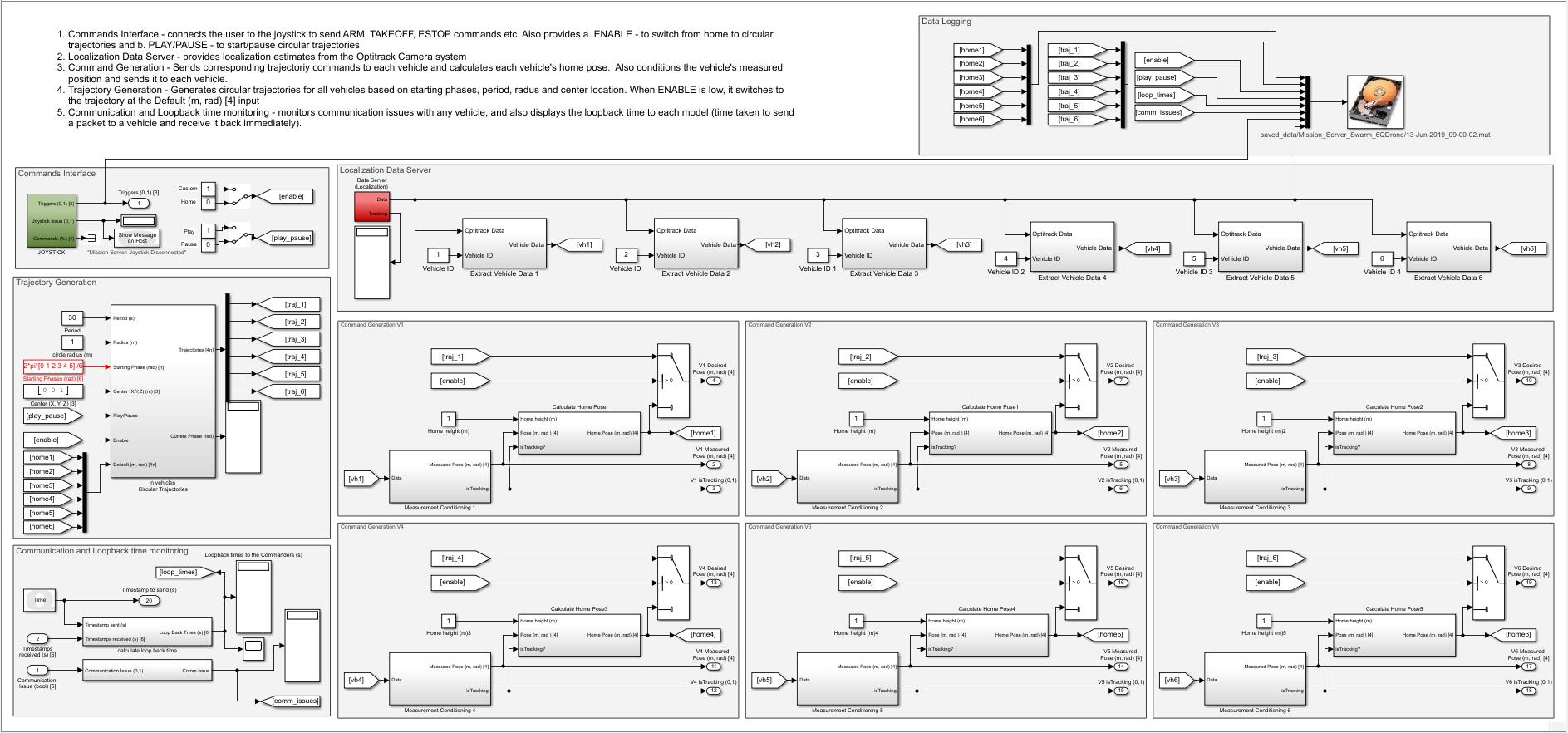
多软件融合的协作自主系统提供了一个基于MATLAB/Simulink的实现多智能体协调控制的工具,帮助用户很方便的将自己的控制器和算法通过这个平台工具进行实现及验证。目前该模式在全球的无人系统研究中得到广泛应用。
如今,随着人工智能(AI)的兴起,为了帮助使用不同语言和工具的用户在同一平台上实施算法,多软件融合的协作自主系统搭载的软件创造性的把MATLAB/Simulink、Python、ROS打通,实现在一套系统中的混合算法编程与实物验证,同时,系统还同步引入了数字孪生环境界面,实时模拟无人工具协同运行过程中的天气与日夜变换。该系统含无人驾驶实验系统和自主多智能体协同控制系统,可根据科研方向独立建设和实时无缝扩展。
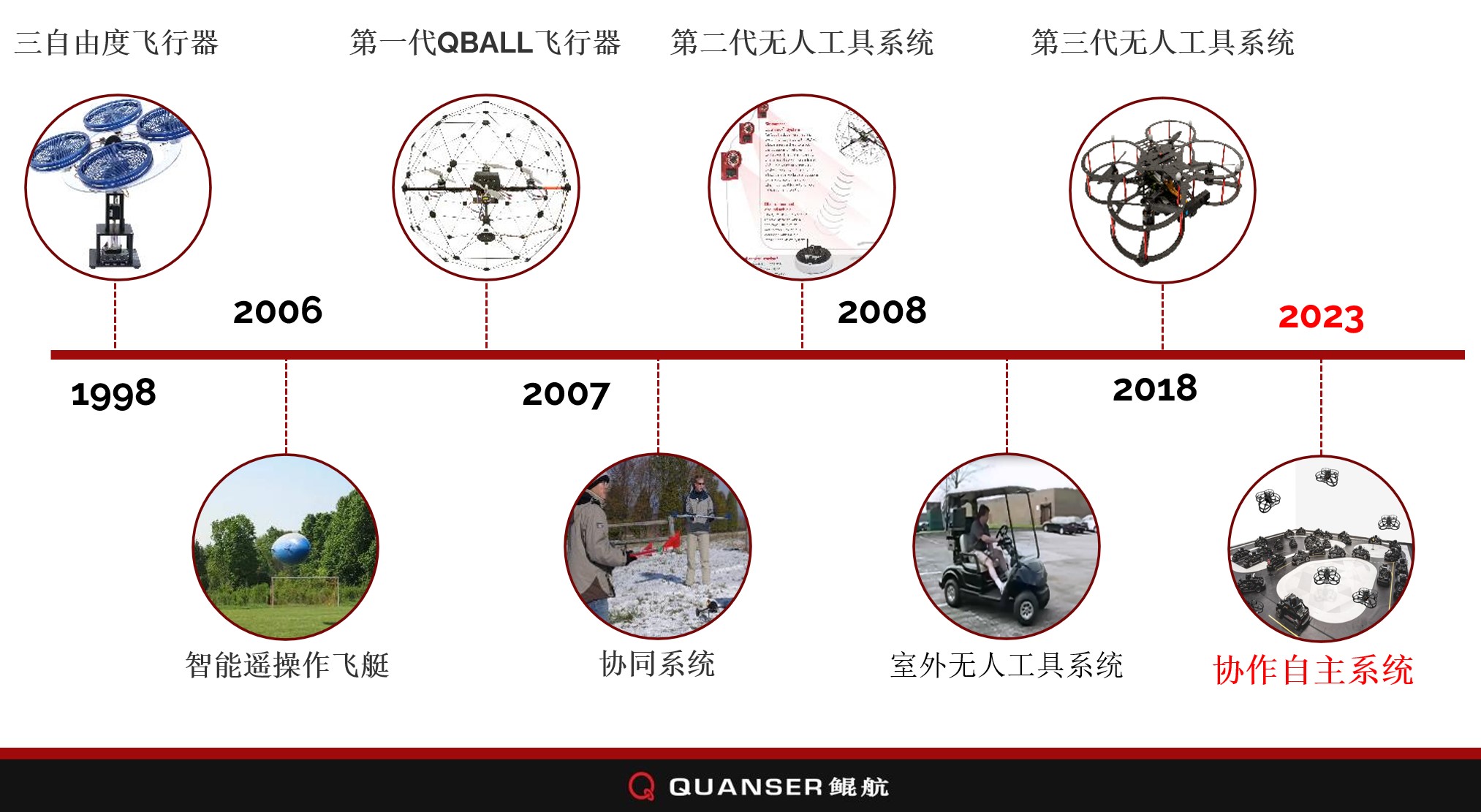
多软件融合的协作自主系统历经二十多年发展,吸收了前几代产品的所有优点,是适合科研人员验证和测试算法的成熟系统。
比较适合的研究范围包括:
- 先进飞行控制
- 容错控制
- 动态对接
- 非垂直起飞降落
- 群控
- 机器视觉
- 防撞避障
- SLAM和自主控制
- 监控和绘图
- 机器学习和人工智能
- 有效负载平衡和转移
- 多信息融合
- 大数据收集
- 感知网络
- 传感器融合
- 搜寻和救援
- 群体异构
- 自动驾驶
- 数字孪生
为什么选择室内实验?
多软件融合的协作自主系统(QStudio)在室内空间进行控制研究与教学。室内操作具有方便介入实验,环境安全可控,实验条件要求相对简单等优点。此外,飞行器的框架使用特殊定制的碳纤维抗冲击性强,避免实验人员在误操作等情况下对飞行器造成损坏。
实验系统简介
多软件融合的协作自主系统由如下几部分组成:
- 实时控制软件和多智能体任务开发体系
- 地面控制站
- 无人飞行器
- 无人地面机器人Ⅰ(两轮机器人)
- 无人地面机器人Ⅱ(可用于无人驾驶研究的四轮机器人)
- 无人驾驶数字孪生



系统各部分简介
- 实时控制软件完全与MATLAB/Simulink兼容
- 支持多线程和多模型
- 支持TCP/IP,UDP,共享内存等多种协议
- 多智能体任务开发体系
- 多软件融合的协作自主系统中,无人飞行器和地面无人车辆提供高性能处理器。工作原理采用Host-Target模式,控制器开发在装有MATLAB/Simulink的Host主机实现,控制器搭建完成后直接在Simulink下进行编译并通过无线通讯协议下载到无人工具的嵌入式控制器(target机)就可以进行实时控制了。此外,一台Host主机可以同时控制多台不同的嵌入式Target机器,从而很方便地在MATLAB环境下进行多智能体系统控制研究。
2.地面控制站
多软件融合的协作自主系统的地面控制站是整个系统的核心“大脑”,通过它来实现包括定位,多智能体控制等系列功能,所有功能都是在MATLAB/Simulink环境下来进行设计和实时控制实现。地面控制站由以下附件组成:
- 高性能工作站
- 可扩展式红外摄像头
- 三维空间监控装置
- 防护地板及防护网
- 高性能充电装置
高性能工作站
3.无人飞行器

4.无人地面机器人Ⅰ

5.无人地面机器人Ⅱ(可用于无人驾驶研究的四轮机器人)

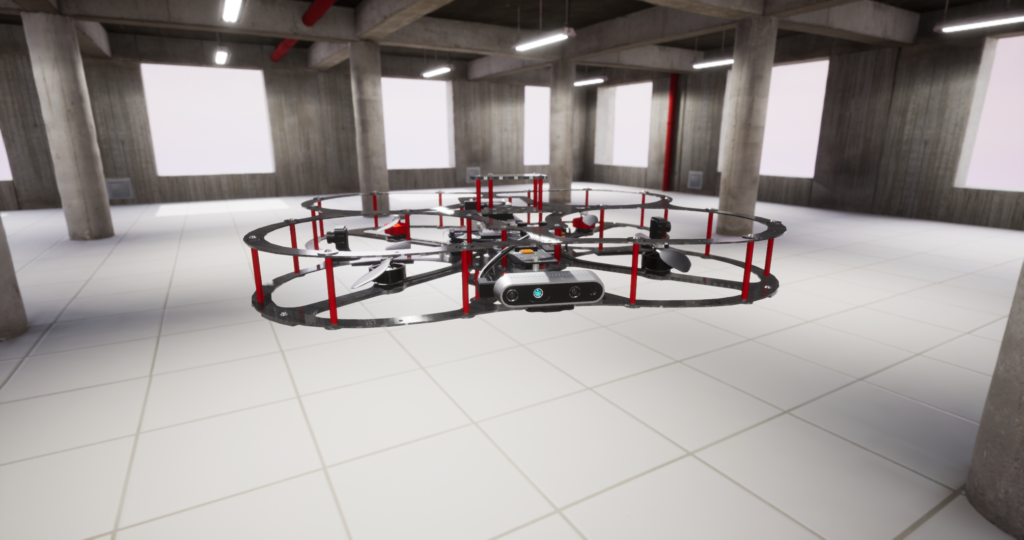
6.无人驾驶数字孪生
无人驾驶算法的开发需要考虑到各种场景的变化,在实车上去测试是一件费时费力,投入产出比较低的工作。无人驾驶数字孪生功能就是为了解决这个问题而开发的。整体环境由虚拟软件建模而成,但车辆运行的传感器数据和实时状态均来自于实车,这样既能在实验室快速取得测试结果,又能保证数据的真实与准确。
无人驾驶数字孪生是无人驾驶系统的动态精确的数字孪生模型。它的行为方式与物理硬件相同,可以使用 Python、ROS 和 MATLAB/Simulink 开发环境进行测量和控制。

系统配置及空间需求:

用户可以根据自己的研究及教学任务自行增加设备和红外摄像头数量,具体配置方案参见上表。
 沪公网安备 31011202011813号
沪公网安备 31011202011813号